Lead PI: Shun Cao
Federal Fund Allocation (Year 2024-2025): $30,800
Project Description
Evidence from empirical and theoretical research in Connected and Autonomous Vehicles (CAVs), Vehicular Ad Hoc Networks (VANETs), Cybersecurity, and roadway networks consistently support the looming threat of cascading failures in future intelligent traffic systems due to intentional cyber-attacks. It is critical to address the Cybersecurity concerns as we progress towards more advanced transportation systems. However, these types of cyber risks combined with cascading failures in large-scale traffic systems remain poorly understood and evaluated. Therefore, this study aims to evaluating cyber-attack threats on Vehicular Ad Hoc Networks and comprehensively assessing their potentials leading to the cascading failures on a large-scale traffic system.
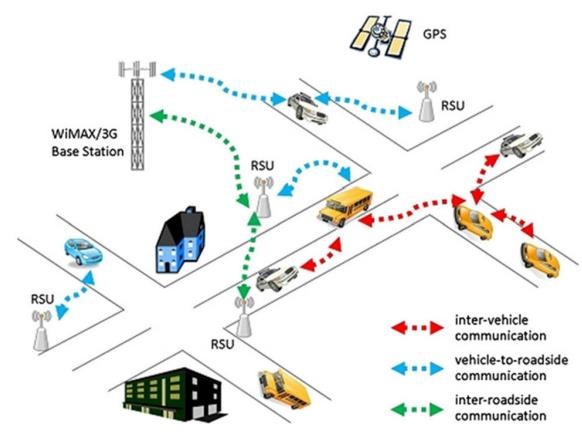
Vehicular Ad Hoc Networks (VANETs) enable autonomous vehicles, whether operating individually or in coordinated platoons, to communicate with each other and with roadside units (RSUs) via onboard units (OBUs), creating a highly interconnected intelligent-transport environment that, while enhancing safety and efficiency, also exposes the system to sophisticated cyberattacks capable of manipulating vehicle behavior. Such attacks can cascade across geographic roadway networks, which are modeled as graphs whose nodes represent intersections or discrete roadway segments and whose edges represent the connecting roads, triggering widespread traffic disruptions when exploited vulnerabilities allow an adversary to alter the collective behavior of vehicles. In this project, we will leverage data-driven techniques and systematically analyze common autonomous-vehicle software development toolkits (e.g., NVIDIA’s self-driving SDK) and RSU firmware to uncover memory-based vulnerabilities, which are among the most prevalent and dangerous flaws, and assess whether they can be remotely exploited to induce cascading failures. Our cascading failure analysis will involve (1) graph-theoretic modeling of real-world roadway topologies, (2) identification of critical nodes and links via degree distributions, centrality metrics, and spectral analysis, and (3) propagation studies to map how localized disruptions spread through the network and degrade overall traffic flow.

The project uses multiple-agent modeling method to model the overall traffic systems, in which there are three types of agents: autonomous vehicles, platoons (clusters of autonomous vehicles), and roadside units. Autonomous vehicles will navigate the geographic roadway network, moving from one node (i.e., a location) to another, while roadside units are positioned at fixed locations. The connections among vehicles and roadside units will be established using network protocols of VANETs. Individual autonomous vehicles and platoons have the capability to operate independently and operate based on the platoon leader, respectively, making decisions on speeding up, slowing down, changing lanes, etc. Their behaviors are influenced by other local vehicles, roadside units, and the overall perceived environment, as well as received broadcasted information. Then the model can be used to assess the resilience of the modeled traffic systems under various types and scales of cyber-attacks.