Communicating and navigating underwater is tough—especially for the robotic vehicles that inspect and repair deep-sea equipment. This project is developing a smarter way for these underwater robots to “talk” and find their way using magnetic signals, even in murky or noisy conditions where cameras and sound don’t work well. The goal is to make underwater missions safer, faster, and more reliable.
Project Significance & Impact
Underwater robots are essential for inspecting and maintaining offshore equipment,
but they often struggle to communicate or navigate in deep, dark, or noisy waters.
This project is creating a new system that uses magnetic signals—alongside sound—to
help these robots stay connected and know exactly where they are, even when visibility
is poor or sound is disrupted.
By improving how these robots operate, the project helps reduce the need for risky
human dives, speeds up underwater repairs, and makes offshore energy operations safer
and more efficient. It’s a big step toward smarter, more dependable underwater technology.
Project Outcomes
Project Details
Wireless remote-operated vehicle (ROV) communications and localization are topics of research in academia and industry due to the challenges the medium imposes on transmission methods. Electromagnetic (EM) waves attenuate severely due to water's high conductivity, while vision-based approaches require line-of-sight and are affected by turbidity.
Acoustic transmissions are currently the dominant technology in use for underwater wireless communications. They can operate at long ranges and can be used for localization. However, they suffer from low data rates, high propagation delay, and high susceptibility to acoustic noise.
Magnetic induction (MI) systems have been proposed as an alternative for underwater localization and communications. MI refers to the near-field component of the magnetic field of a transmitting antenna. Because the field is mostly reactive in this region, it penetrates lossy media better than traditional RF methods that operate in the far field. MI coils are low-cost devices that could enable more widespread use of automated underwater maintenance systems. Besides communication and localization, MI coils can be used to locate metallic structures by sensing the change in the magnetic field caused by the material. This type of detection could help prevent collisions or identify structures.
MI communications do not suffer from propagation delay and do not require line of sight. However, they have a limited range, a low bandwidth, and directional ambiguity. A hybrid method relying on both MI and acoustic transmissions would leverage both technologies' advantages and mitigate the effect of each method's weaknesses.
MI is a promising technology, but research remains to be made to design a performant, reliable device. For example, electromagnetic interferences can affect MI localization and communications. Solutions to reduce the effect of electromagnetic noise must be studied.
Underwater vehicles need high accuracy, short range non-optical localization. Remotely operated vehicles (ROVs) are relied on for subsea inspection, maintenance, and repair of structures where access by human personnel is dangerous. Work on subsea trees requires the ROV to accurately approach and manipulate controls. When the ROV needs to recharge or share high bandwidth information, the ROV must dock with subsea structures. These types of maneuvers require precise localization, which is often performed using cameras and optical tracking. Collisions during these activities are dangerous for both the structure and the ROVs. Optical methods using lasers and/or a visual fiducial system have some limitations, especially in debris-filled or silt-laden water. Additionally, optical systems require a line-of-sight between the sensor and the target.
Competing technologies include acoustic localization and EM-based localization. Acoustic communications are commonly used for long range localization (meter to kilometers), but even the best accuracy of Long-baseline (LBL) systems is in the ±0.01 m range. Acoustic localization is limited by acoustic noise, and many operations (drilling, blowout) are acoustically noisy.
Additional Media Assets:
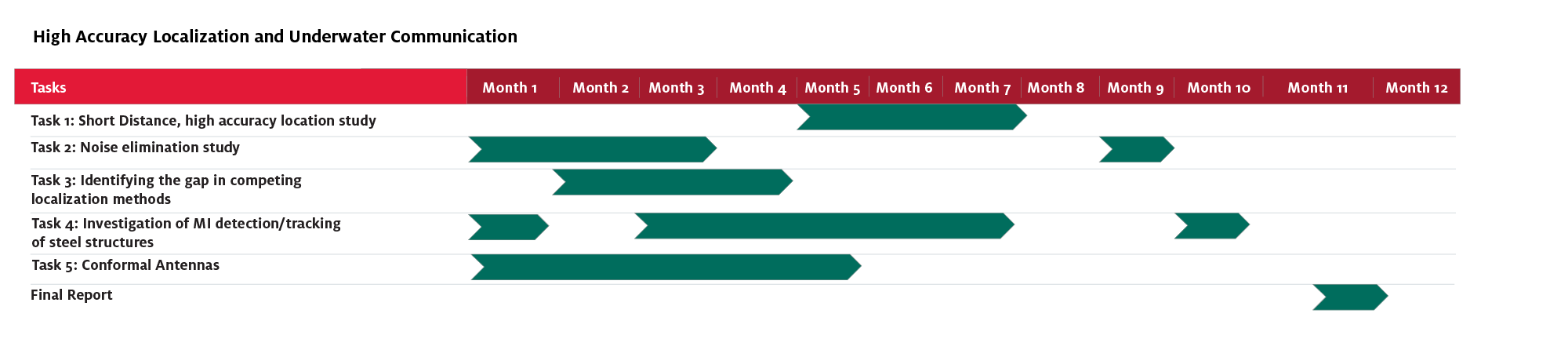
Gantt Chart: