Project Highlights
Developing Bio-Inspired Buoyancy Control for Subsea Service AUVs
Subsea Systems InstituteUnderwater robots are becoming the future of deep-sea exploration and maintenance, especially in places like the Gulf of Mexico. This project is developing smarter, more energy-efficient robots inspired by marine animals. These robots will be able to adjust their buoyancy—how they float or sink—so they can carry tools, inspect equipment, and perform repairs more effectively, all while using less energy.
Project Significance & Impact
As offshore oil and gas operations move into deeper and more challenging waters, we
need robots that can work safely and efficiently where humans can’t go. Today’s underwater
robots are powerful but often bulky, energy-hungry, and limited in how they move and
interact with their environment.
This project is changing that by designing robots that mimic how sea creatures control
their buoyancy. These new robots will be able to lift objects, adjust their position,
and perform complex tasks without wasting energy. That means safer, more cost-effective
maintenance of underwater equipment—and a big step toward fully automated, sustainable
deep-sea operations.
Project Outcomes
Project Details
Humans have created robots to help us perform tasks underwater. It will not be too long before we will see robots fully automate deepwater Gulf of Mexico exploration, production, and decommissioning. Subsea industry is quickly moving toward deeper waters, complex, challenging, and dynamic working environments, while requiring the highest level of safety. Tasks that have been historically undertaken by workers in shallow waters are now performed by Remotely Operated underwater Vehicles (ROV) at water depths that humans cannot support. Work-class ROVs (WROV), in particular, are being used for surveillance as well as for intervention.

ROVs suffer from several limitations including requirement of a large operating crew, a need of a dynamically positioned surface vessel, tether management, and high cost mobilization and demobilization. Autonomous Underwater Vehicles (AUV) are now emerging with new capabilities and technologies that could make them more efficient and more cost effective than ROVs. Hydrocarbon development environments of deep and ultra-deep water in the Gulf of Mexico and other regions in the world require AUVs that can autonomously operate in confined spaces and can perform forceful interactions with the assets. Hence, new paradigms in shape, autonomy, sensing and communication and physical capabilities are needed to make AUVs the tool of choice for deepwater industry.
Currently, subsea robots are built rigid and neutrally buoyant so that their volume remains unchanged despite the changing fluidic pressure. Although they are normally big and heavy, underwater service robots can take advantages of their neural buoyant state to save energy when they are maneuvering and operating in subsea environments. However, when ROVs perform tasks such as picking and placing tools or collecting disassembled parts in offshore asset's monitoring, repairing, and decommissioning, they will deviate from the neutral buoyancy state. Under such circumstances, the service robots must constantly actuate to maintain their depth, which is energy inefficient as was recently demonstrated by the PIs. AUVs rely on their thrusters and possibly a ballast to actively control buoyancy. This is achieved by thruster and pump control. If AUVs are involved in forceful interactions including lifting objects or executing a forceful act, thrusters and a ballast may not be fully adequate for real-time buoyancy control.
Additional Media Assets:
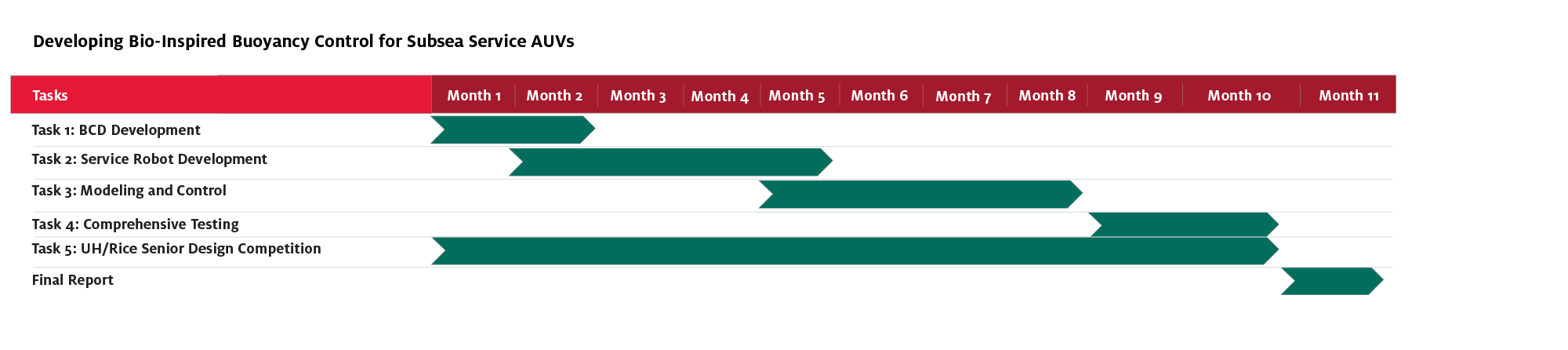
Gantt Chart: